Beschleunigungsmesser
Wie der Name schon sagt, misst der Beschleunigungsmesser die Beschleunigung oder anders gesagt, die Bewegungsänderungen deines BBC micro:bit. Der Beschleunigungsmesser ist so eingestellt, dass er Beschleunigungswerte im Bereich von +2g bis -2g misst (mit g wird die Größe der Erdbeschleunigung bzw. Gravitation bezeichnet), und diese Werte können mit MicroPython ausgelesen und auf den Bereich 0 … 1024 abgebildet werden.

Der micro:bit misst die Bewegung entlang dreier Achsen:
X - Bewegung/Kippen von links nach rechts.
Y - Bewegung/Kippen nach vorne und hinten.
Z - Bewegung nach oben und unten.

Grundfunktionen
Die Messung für jede Achse ist eine positive oder negative Zahl die einen Wert in milli-g’s angibt. Wenn der Messwert 0 ist, bist du „ruhig“ entlang der jeweiligen Achse.
Du kannst die Beschleunigungswerte einzeln oder alle drei Werte auf einmal abrufen und sie in einer Liste speichern. Du kannst mehr über Listen in den Grundlagen der Programmierung lernen, aber für den Moment verwende einfach den folgenden Code:
from microbit import *
while True:
x = accelerometer.get_x()
y = accelerometer.get_y()
z = accelerometer.get_z()
print("x, y, z:", x, y, z)
sleep(500)
Lade den Code auf den micro:bit und öffne den seriellen Monitor. Halte den micro:bit flach mit den LEDs nach oben. Du solltest sehen, dass die X- und Y-Beschleunigungen nahe Null sind, und die Z-Beschleunigung nahe bei -1024. Das bedeutet, dass die Schwerkraft relativ zum micro:bit nach unten wirkt. Drehe das Board um so dass die LEDs dem Boden am nächsten sind. Der Z-Wert sollte positiv werden bei +1024 milli-g. Wenn du den micro:bit kräftig genug schüttelst, wirst du sehen, dass die Beschleunigungen bis zu ±2048 milli-g ansteigen. Das liegt daran, dass der Beschleunigungssensor auf ein Maximum von ±2048 milli-g eingestellt ist: die tatsächliche Zahl kann höher sein als das.
Wenn du dich jemals gefragt hast, woher ein Mobiltelefon weiß, in welche Richtung es den Bildschirm ausrichten soll, dann liegt das daran, dass es den Beschleunigungssensor auf genau die gleiche Weise wie das obige Programm abfragt. Auch Gamecontroller enthalten Beschleunigungssensoren, um die Steuerung zu ermöglichen.
Gesten
Eine wirklich interessante Anwendung des Beschleunigungssensors ist die Gestenerkennung. Wenn du deinen BBC micro:bit auf eine bestimmte Art und Weise bewegst (als Geste), dann ist der micro:bit in der Lage, dies zu erkennen.
Der micro:bit ist in der Lage, die folgenden Gesten zu erkennen:
up,downleft,rightface up,face downfreefall,3g,6g,8gshake.
Gesten werden immer als Strings dargestellt. Während die meisten Namen
offensichtlich sein sollten, gelten die 3g, 6g und 8g Gesten, wenn
das Gerät entsprechend schnell beschleunigt wird.
Um die aktuelle Geste zu erhalten, benutze die Methode accelerometer.current_gesture().
Das Ergebnis wird eine der oben genannten Gesten sein.
Zum Beispiel wird dieses Programm ein glückliches Emoticon anzeigen, wenn das Display nach oben zeigt:
from microbit import *
while True:
geste = accelerometer.current_gesture()
if geste == "face up":
display.show(Image.HAPPY)
else:
display.show(Image.ANGRY)
Innerhalb des Geltungsbereichs (Scope) der Schleife wird die aktuelle Geste gelesen und der Variablen
gestezugewiesen.Die
if-Bedingung prüft, obgestegleich"face up"ist (Python verwendet==, um auf Gleichheit zu testen, ein einzelnes Gleichheitszeichen=wird für die Zuweisung verwendet - so wie wir die gelesenen Gesten in der Zeile darüber der Variablengestezugewiesen haben).Wenn die Geste gleich
"face up"ist, dann benutze das Display, um ein glückliches Gesicht zu zeigen.Ansonsten wird das Gerät dazu gebracht, wütend dreinzuschauen!
Was macht das folgende Programm?:
from microbit import *
while True:
if accelerometer.is_gesture("up"):
display.show(Image.ARROW_S)
elif accelerometer.is_gesture("right"):
display.show(Image.ARROW_E)
elif accelerometer.is_gesture("down"):
display.show(Image.ARROW_N)
elif accelerometer.is_gesture("left"):
display.show(Image.ARROW_W)
else:
display.clear()
sleep(20)
Fortgeschrittene Funktionen
Für den Beschleunigungssensor gibt es keine, aber es lohnt sich zu schauen, wie wir die 3D-Beschleunigung nutzen können, um verschiedene Arten von Bewegung zu erkennen.
Wir könnten zB erkennen wollen, ob unser micro:bit geschüttelt wird. Die Beschleunigung ist eine sogenannte Vektorgröße - sie hat einen Betrag (Größe, Länge) und eine Richtung. Um den Gesamtbetrag in X- und Y-Richtung zu erhalten, ohne auf die Z-Achse zu achten, könnte man bei dieser 2D-Beschleunigung dann wie folgt vorgehen:
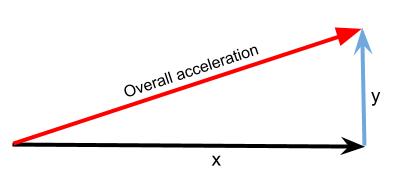
Wir können den Betrag (Länge) der Resultierenden mit dem Satz des Pythagoras berechnen:
Das gleiche Prinzip gilt für einen 3D-Beschleunigungsmesser. Der Gesamtbetrag des resultierenden Beschleunigungsvektors ist also gleich:
Berechnung der Gesamtbeschleunigung:
from microbit import *
import math
while True:
x = accelerometer.get_x()
y = accelerometer.get_y()
z = accelerometer.get_z()
beschleunigung = math.sqrt(x**2 + y**2 + z**2)
print("Beschleunigung", beschleunigung)
sleep(500)
Wenn du den Beschleunigungssensor still hältst (auf den Tisch legst), ergibt dies eine Beschleunigung von etwa 1g, unabhängig davon, in welcher Orientierung du den BBC micro:bit hältst. Wenn du nun den micro:bit bewegst, wird sich dieser Wert ändern und davon abweichen. Tatsächlich wird der Wert leicht variieren, auch wenn du ihn still hältst, weil der Beschleunigungsmesser kein perfektes Messgerät ist.
Immer wenn wir eine Größe genau wissen wollen, ist eine sogenannte Kalibrierung nötig, bei der die Sensordaten genau eingemessen und mit einem Richtwert verglichen werden.
Übungsaufgaben
Benutze die BBC micro:bit Musikbibliothek und spiele eine Note, die auf dem Messwert des Beschleunigungsmessers basiert. Tipp: Stelle die Tonhöhe auf den Wert des Beschleunigungsmessers ein.
Zeige die Zeichen ‚L‘ oder ‚R‘ an, je nachdem, ob der BBC micro:bit nach links oder rechts gekippt ist.
Lasse die LEDs aufleuchten, wenn die Größe der Beschleunigung größer als 1024 milli-g’s ist.
Schüttle den micro:bit, um die LEDs aufleuchten zu lassen.
Mache einen Würfel. Tipp: benutze eine der Python Zufallsfunktionen. Gib
import randomam Anfang deines Programms ein und verwenderandom.randrange(start, stop). Dies wird eine Zufallszahl zwischenstartundstop - 1erzeugen.